机器学习的一些概念
监督学习、非监督学习、半监督学习的区别
监督学习、非监督学习和半监督学习区别就是训练数据是否拥有标签信息
监督学习:给出了数据及数据的标准答案来训练模型。Regression回归问题、classification分类问题都是典型的监督学习
非监督学习:给了一组数据,但没有给出数据的标签信息,需要从数据中去发现数据间隐藏的结构信息。聚类问题是典型的非监督学习
半监督学习:给出了大量没有标签的数据和少量拥有标签的数据训练模型
过拟合、欠拟合、泛化能力
欠拟合:模型没有很好的捕捉到数据特征,不能够很好的拟合数据
过拟合:模型把训练数据学的“太好了”,导致把数据中的潜在的噪声数据也学到了,测试时不能很好的识别数据,模型的泛化能力下降。
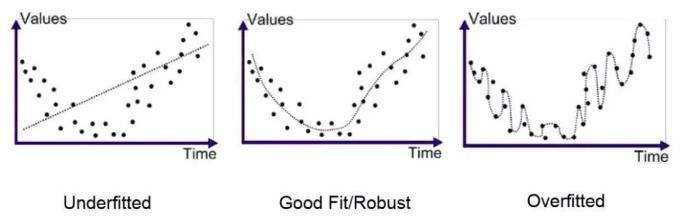
泛化能力**:训练的模型适用于新样本的能力,称为“泛化”能力,具有强范化能力的模型能很好的适用于整个样本空间
线性回归的原理
线性回归遇到的问题一般是这样的。我们有 $m$ 个样本,每个样本对应于 $n$ 维特征和一个结果输出,如下:
我们的问题是,对于一个新的 $(x^{(x)}_1,x^{(x)}_2,\dots x^{(x)}_n)$ , 他所对应的 $y^{(x)}$是多少呢? 如果这个问题里面的 $y$ 是连续的,则是一个回归问题,否则是一个分类问题。
对于 $n$ 维特征的样本数据,如果我们决定使用线性回归,那么对应的模型是这样的:
其中 $\theta_i(i = 0,1,2\dots n)$ 为模型参数,$x_i (i = 0,1,2\dots n)$ 为每个样本的 $n$ 个特征值。这个表示可以简化,增加一个特征 $x_0=1$ ,这样 $h_θ(x_1,x_2,…x_n)=\sum_{i=0}^n\theta_ix_i$。
进一步用矩阵形式表达更加简洁如下:
其中, 假设函数 $h_\theta(X)$ 为 $m1$ 的向量,$θ$ 为 $n1$ 的向量,里面有 $n$ 个代数法的模型参数。$X$ 为 $m*n$ 维的矩阵。$m$ 代表样本的个数,$n$ 代表样本的特征数。
得到了模型,我们需要求出需要的损失函数,一般线性回归我们用均方误差作为损失函数。损失函数的代数法表示如下:
进一步用矩阵形式表达损失函数:
线性回归损失函数、代价函数、目标函数
损失函数:$\left| y_i-f(x_i) \right|$ ,一般是针对单个样本 i
代价函数:$1/N.\sum_{i=1}^{N}{\left| y_i-f(x_i) \right|}$ , 一般是针对总体
目标函数:带有正则项的代价函数
优化方法
梯度下降法
沿着梯度下降的方向来求出损失函数的极小值。梯度下降不一定能够找到全局的最优解,有可能是一个局部最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
牛顿法
牛顿法是一种在实数域和复数域上近似求解方程的方法。方法使用函数f (x)的泰勒级数的前面几项来寻找方程f (x)求导 = 0的根。牛顿法最大的特点就在于它的收敛速度很快。
拟牛顿法
拟牛顿法的本质思想是改善牛顿法每次需要求解复杂的Hessian矩阵的逆矩阵的缺陷,它使用正定矩阵来近似Hessian矩阵的逆,从而简化了运算的复杂度。
线性回归的评估指标
平均绝对误差(MAE)
均方误差(MSE)
方均根差(RMSE)
平均绝对百分比误差(MAPE)
R平方
sklearn参数详解
函数:1
sklearn.linear_model.LinearRegression(fit_intercept=True, normalize=False, copy_X=True, n_jobs=None)
- fit_intercept:布尔值。指定是否需要计算线性回归中的截距,即b值。如果为False,那么不计算b值。
- normalize:布尔值。如果为False,那么训练样本会进行归一化处理;当为True的时候,则回归量X将在回归之前通过减去平均值并除以I2范数来归一
- copy_X:布尔值。如果为True,会复制一份训练数据。
- n_jobs:一个整数。任务并行时指定的CPU数量,如果取值为-1则使用所有可用的CPU。
- coef_:权重向量
- intercept_:截距b值